Introductie¶
In de experimentele natuurkunde was het lang geleden gelukt om de krachten tussen ladingen te bestuderen zonder dat bekend was hoe groot die ladingen nu precies waren. Men laadde een metalen bol op en hield deze tegen een andere metalen bol van hetzelfde materiaal. Men redeneerde dat de ladingen op de bollen gelijk waren, omdat ze van hetzelfde materiaal waren. Vervolgens plaatste men de bollen in een vacuüm en mat men de krachten tussen de bollen met een zeer gevoelige balans. Op deze manier kon men de krachten tussen de ladingen bestuderen zonder de absolute waarde van de ladingen te kennen. Dit trucje kon herhaald worden met andere bollen waarna een kwantiatieve beschrijving van de krachten tussen ladingen mogelijk werd.
Een soortgelijke meettechniek gaan we gebruiken om een druksensor te ijken. Van de sensor zijn wel wat dingen bekend, maar omdat de spanning van de Arduino niet overeenkomstig is met de gewenste spanning, zouden we deze moeten ijken. We weten dat de sensor lineair is, dus als we twee punten weten, kunnen we de rest van de curve bepalen. Nog beter zou het zijn om drie punten te nemen en zo ook het lineaire karakter van de sensor te bevestigen.
Theorie¶
Een injectiespuit met een maximaal volume van 50 mL is gevuld met lucht. De spuit kan aan een kant afgesloten worden met een tube die verbonden is met een druksensor die de gasdruk meet. Door de zuiger van de spuit in te drukken, wordt het volume verkleind en de druk verhoogd. Wanneer we de druk langzaam in drukken verwachten we dat de druk in de spuit volgens de wet van Boyle toeneemt:
Omdat de gemeten spanning van de druksensor lineair afhankelijk is van de druk, kan de druk uitgedrukt worden als:
Methode en materialen¶
Je maakt gebruik van een Arduino. Daarvoor heb je de juiste IDE nodig. Het programma staat al op de Arduino’s in het lokaal. Zodra je de Arduino aansluit op je computer zal de Arduino gaan meten, maar zijn de metingen nog niet zichtbaar. Je moet de Arduino op Arduino MKR Zero zetten. Dan wordt nog wel een driver geinstalleerd.
Controleer of de Arduino herkend wordt door op tools -> port te klikken, daar staat de com poort van de Arduino. Open vervolgens de seriële monitor (het vergrootglas rechtsboven in de IDE) om de gemeten spanning te zien.
int drukpin = A1;
void setup() {
pinMode(A1,INPUT);
Serial.begin(9600);
}
void loop() {
Serial.println(analogRead(drukpin));
delay(100);
}Deel 1¶
Stel de injectiespuit in op 40 mL en sluit de spuit aan op de druksensor door middel van een zo klein mogelijke tube. Meet de spanning van de druksensor met de Arduino en noteer deze waarde als . Druk vervolgens de zuiger langzaam in tot 20 mL en meet opnieuw de spanning van de druksensor, noteer deze waarde als . Herhaal dit voor volumes van 10 mL.
Leg uit waarom een zo klein mogelijke tube gebruikt moet worden.
Welke waarde hoort bij de gasdruk bij 40 mL? Zoek deze waarde op.
Welke waarden horen bij de gasdruk bij 20 en 10 mL?
Gebruik de drie punten om de waarden van en in vergelijking 2 te bepalen en controleer of de sensor inderdaad lineair is door de waarden te plotten.
Deel 2¶
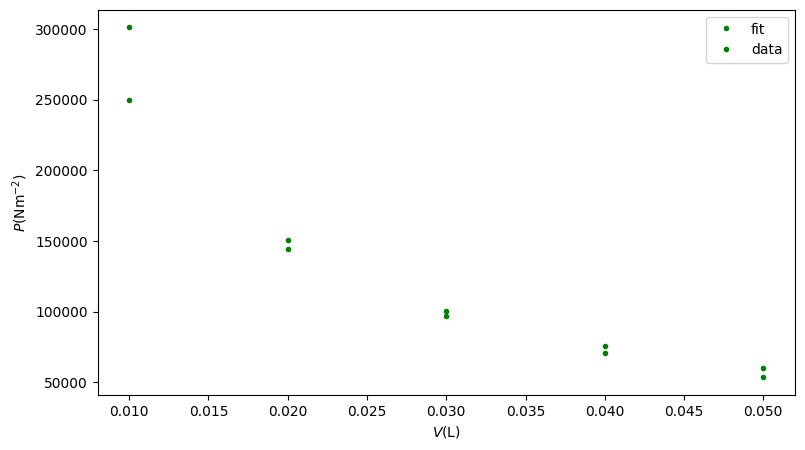
Vervang daarbij de kleine tube voor een langere en bepaal het onbekende volume van de tube met een volgende meetserie waarbij je de druk en het volume bepaald. Zorg ervoor dat ook drukken onder de 1 atm gemeten worden.
Resultaten¶
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import curve_fit### Jouw data en code
p0 = 100415 # Pa - gemeten met phyphox
U_array = np.array([180,317,551]) #
V_array = np.array([0.040,0.020,0.010]) # Volume (L)
P_array = (V_array[0]*p0)/V_array # Druk (Pa)def P_func(x,a,b): # Lineaire fit-functie
return a*x + b
var, cov = curve_fit(P_func,U_array,P_array) # Function fit
P = P_func(U_array,*var) # "Fit" plot
plt.figure(figsize=(9,5))
plt.plot(V_array,P,'g.', label='Fit')
plt.plot(V_array, P_array, label='Data')
plt.xlabel('$V \mathrm{(L)}$')
plt.ylabel('$P \mathrm{(Nm^{-2})}$')
plt.legend()
plt.show()
plt.savefig("../../Figures/druksensorijken_1.png", dpi=450)
print(f'a = {var[0]:.0f} P')
print(f'b = {var[1]:.0f} P')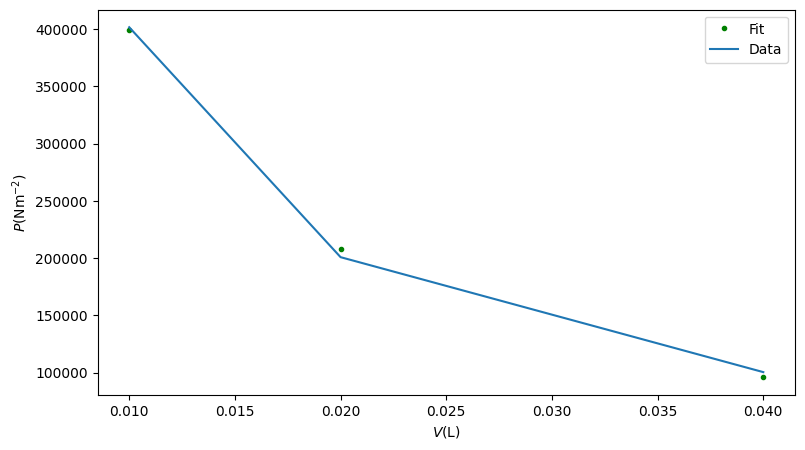
a = 817 P
b = -51088 P
<Figure size 640x480 with 0 Axes>U2_array = np.array([181,239,368,149,128]) #
V2_array = np.array([0.030,0.020,0.010,0.040,0.050]) # Volume (L)
P2 = P_func(U2_array,*var) # Druk
plt.figure(figsize=(9,5))
plt.plot(V2_array,P2,'g.', label='fit')
plt.plot(V2_array,(V2_array[0]*p0)/(V2_array),'g.', label='data')
plt.xlabel('$V \mathrm{(L)}$')
plt.ylabel('$P \mathrm{(Nm^{-2})}$')
plt.legend()
plt.show()
plt.savefig("../../Figures/druksensorijken_1.png", dpi=450)
<Figure size 640x480 with 0 Axes>def V_error(x,a):
return (x+a)/(V2_array[0]+a)
V_buis, cov_V_buis = curve_fit(V_error,V2_array,P2[0]/P2)
print(f'Dode volume: {V_buis[0]:.5f} +/- {np.sqrt(cov_V_buis[0][0]):.5f} L')Dode volume: -0.00177 +/- 0.00180 L
We hebben zo een klein mogenlijk buisje nodig, omdat het buisje ook volume heeft, hoe kleiner het buisje, hoe lager het extra volume van het buisje en aangezien het volume van het buisje niet wordt meegenomen in de berekeningen betekent een kleiner buisje een kleinere systematische fout.
We komen op een negatief dood volume uit - waarschijnlijk omdat de lineaire fit tot een te steile helling heeft geleid. De onzekerheid van de fit is daardoor ook relatief groot. Een beter resultaat zal waarschijnlijk leiden uit uitgebreidere metingen, en een mogelijk niet-linaire fit.